

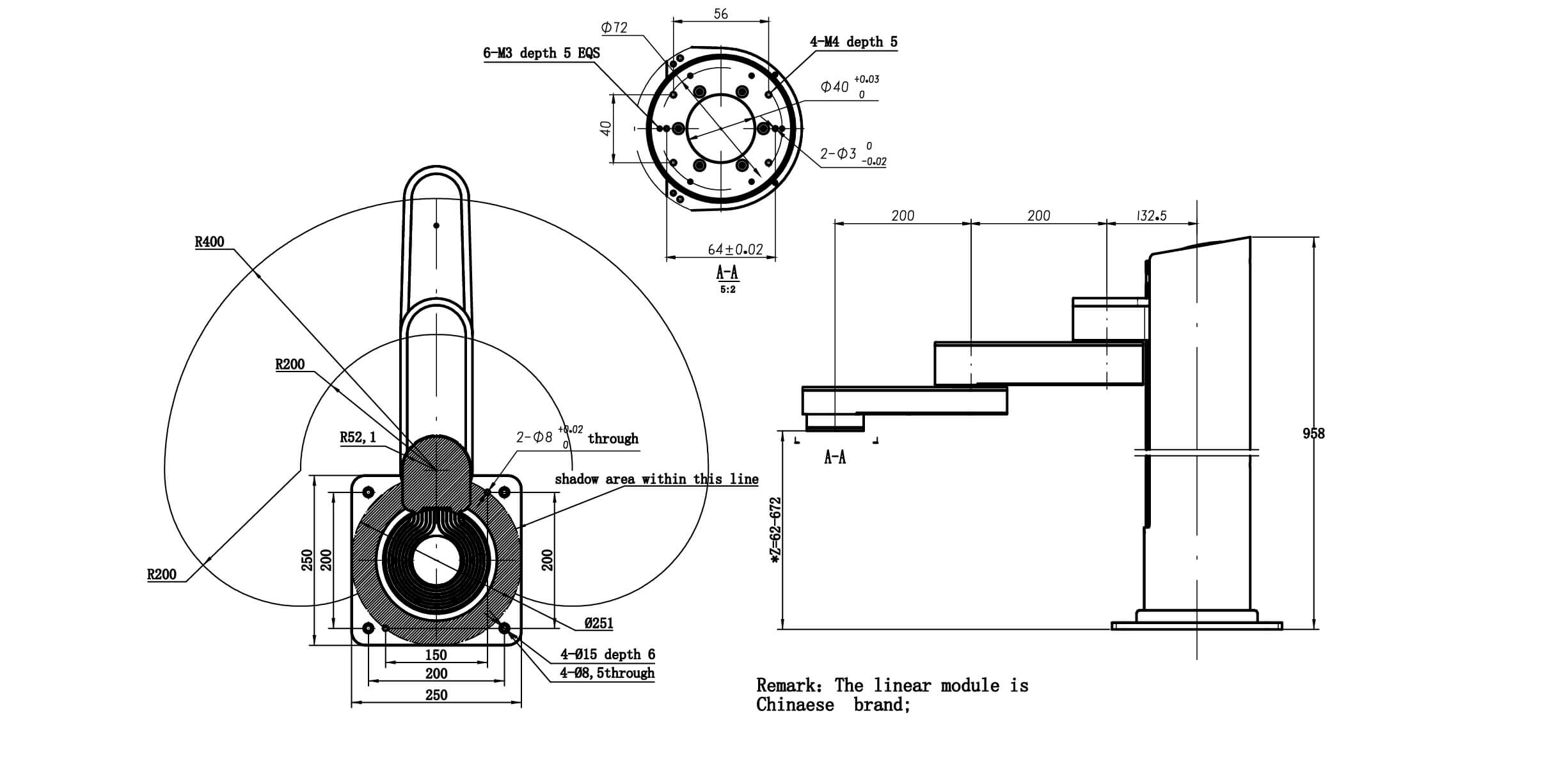
Z-Arm 6140 Core Facts
±0.03mm
Repeatability
3Kg
Max Payload
400mm
Reach
610mm
Z-axis
* Drawing
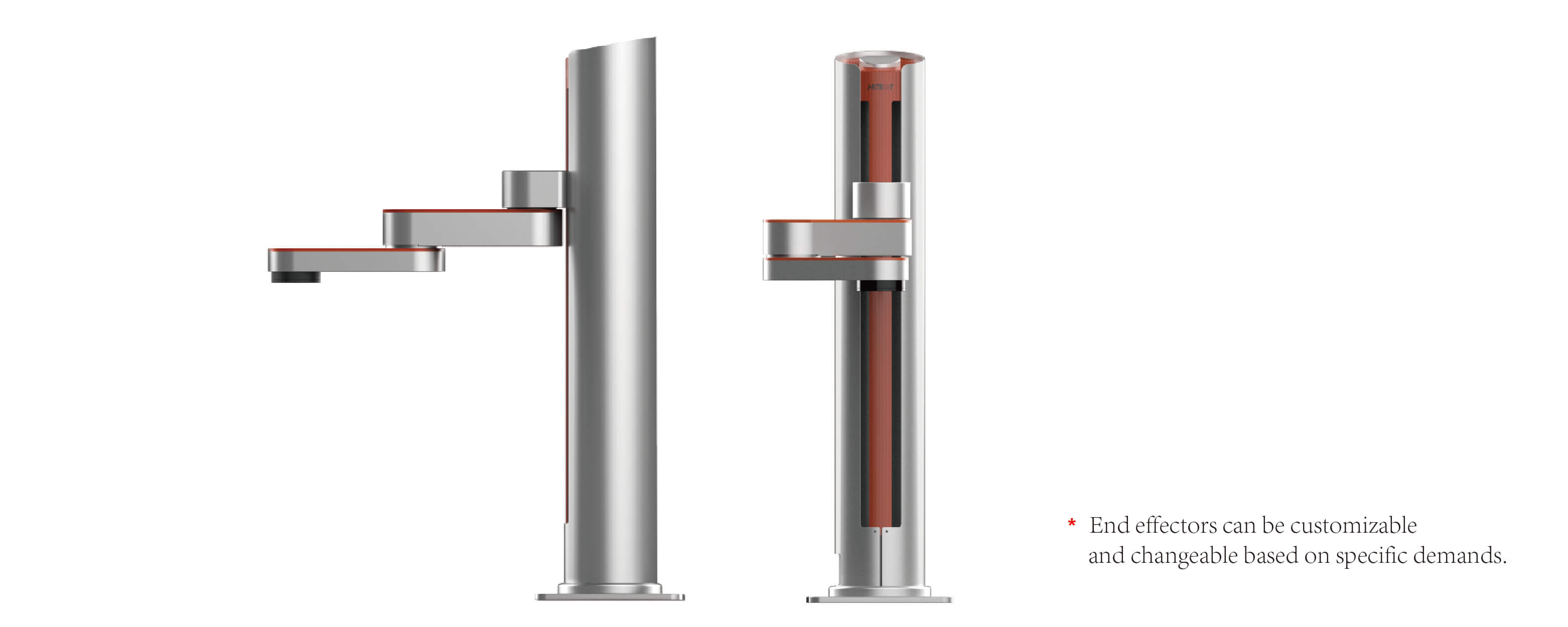
Product Features
Open-source Hardware
Hitbot Z-arm 6140 is an open-sourced hardware cobot, which can be customized by customers themselves based on specific requirements. Supported programming languages includes V-rep, Ros, Matlab, Java, Paython and etc.
Great Affordability
Offering a competitive price comparable to non-collaborative robots, Hitbot provides table-top cobots at amazingly affordable prices which greatly lowers the entry level of industrial automation.
Unrivaled Performance
Utilizing the self-develop servo motor, Z-arm 6140 broads highlights of avoiding the issues of backlash, boosting output-motion precision, and allowing for backdriving. Moreover, the precise optical encoder and the customized drive algorithm ensure the repeatability to be up to ±0.02mm.
Simplified Programming
Programming is further simplified. Hitbot Z-arm 6140 mainly can be easily set up in two methods. Users can utilize the self-developed one-stop APP HitbotStudio, or manually drag-and-drop the cobot itself to realizing machine teaching. Both only take about 20 minutes.
Safe Collaboration
Hitbot Z-arm 6140 supports collision detection which will disable motor power when a minimal, unexpected force is encountered, thus allowing these robots to operate without safety shields in benchtop applications. Therefore, it is such a safe mechanisms qualified to work with people.
Open-source Hardware
Hitbot Z-arm 6140 is an open-sourced hardware cobot, which can be customized by customers themselves based on specific requirements. Supported programming languages includes V-rep, Ros, Matlab, Java, Paython and etc.
Huge Work Volume
Hitbot Z-arm 6140 is designed with a unique mechanical design. Due to its novel configuration, Z-arm 6140 an work in cells with very compact foot prints of 250x250mm while providing the vertical reach up to 610mm, horizontal reach up to 400mm, and max payload up to 3KG.
Flexible Deployment
Lightweight, Hitbot Z-arm 6140 can be carried by one person and deployed/redeployed according to the specific manufacturing needs. The controller, power supplies and harnessing are embedded within the robot's structure, eliminating external controller cabinets and simplifying installations. When putting it into operation, users just need to mount it on a table and then plug in just an AC power cord and an Ethernet cable.
| Model | Z-arm 6140 | |
| Programming software | HitbotStudio | |
| Number of axis | 4 | |
| Rated payload | 2KG | |
| Maximum payload | 3KG | |
| Maximum reach | 400mm | |
| J1 reach(1st-axis) | 200mm | |
| J2 reach(2nd-axis) | 200mm | |
| J1 rotation (1st-axis) | ±90° | |
| J2 rotation (1st-axis) | ±164° | |
| Z-axis reach | 610mm | |
| Repeatability | ±0.03mm | |
| Connectivity | Wi-Fi/Ethernet | |
| I/O port | Digital input (isolated): 5 | Digital output (isolated): 5 |
| Collision detection | Supported | |
| Drag to teach | Supported | |

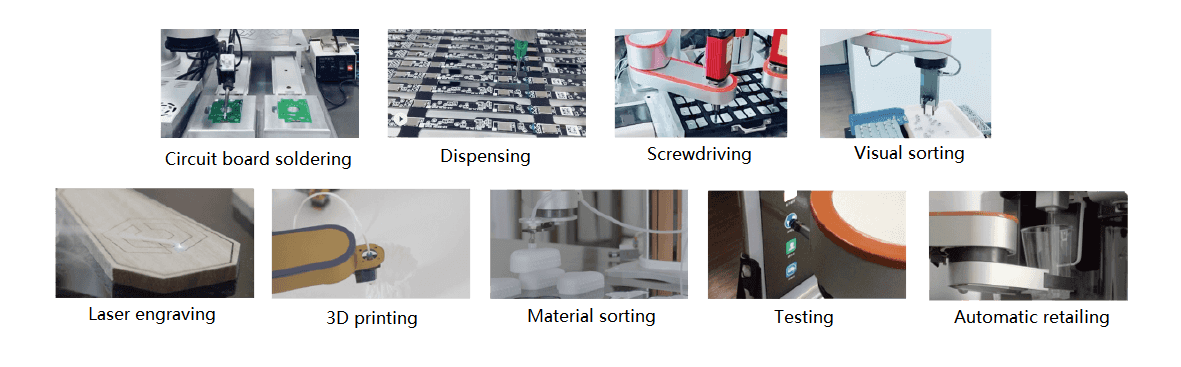
Related Products






